Projects
High Speed Underwater Camera
MIT Sea Grant, 2026
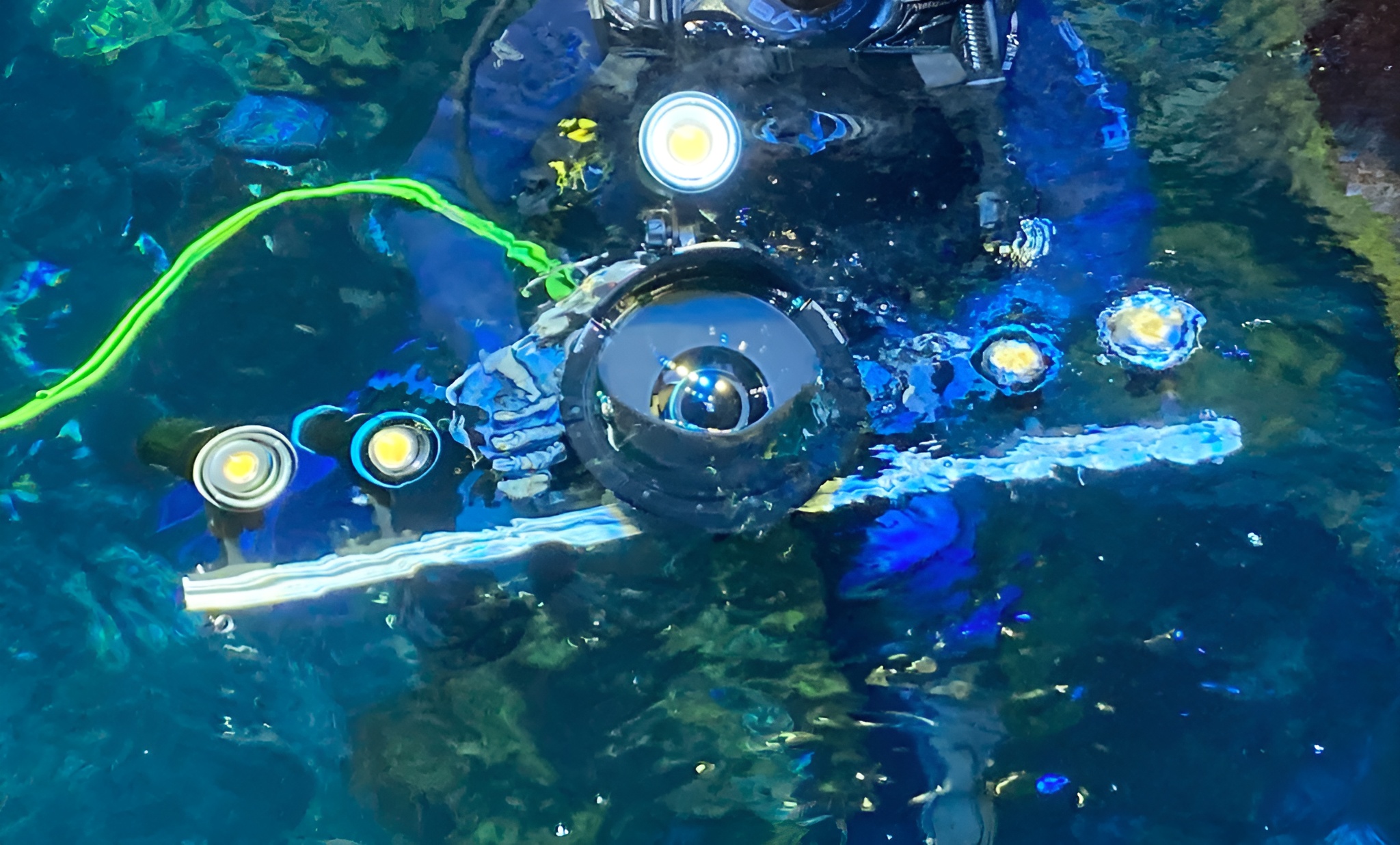
There aren’t really any commercially available waterproof high-framerate underwater cameras, so in early 2025 I joined a project to create one. I developed the current iteration of the lighting system - it turns out that underwater photography requires a lot of light (thousands and thousands of lumens), and they can’t be too close to the lens or else they reflect back into the camera’s sensor quite aggressively.
I developed a modular light mounting system for the underwater camera, seen above in-action. The light mounts can be easily detached, for ease of transport, and the light angles can be quickly adjusted on the fly to suite different focus depths.
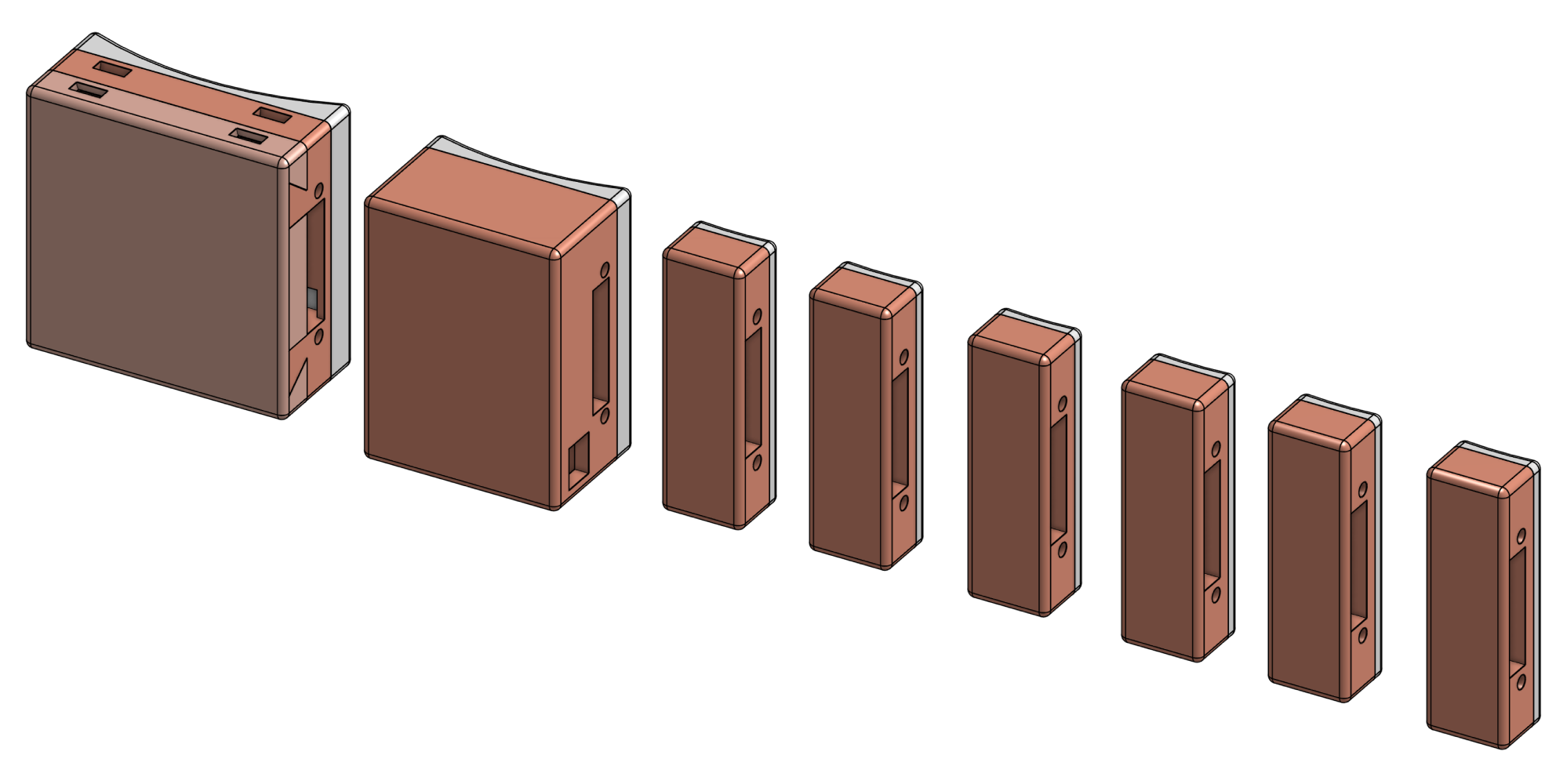
FM Radio
MIT, 2026
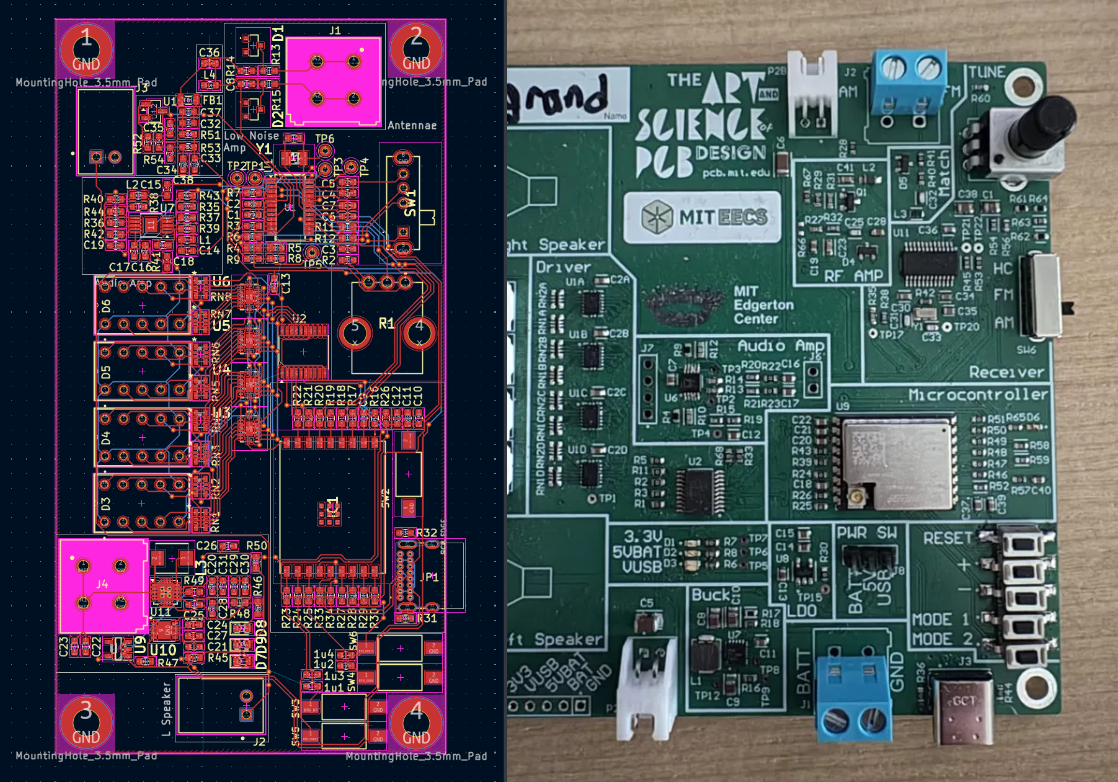
During January of 2026, I designed and built this FM Radio Receiver as part of a PCB-Design crash course class. I manufactured revision 1, seen on the right, at the beginning of February. Revision 2 (on the left) is a current hobby project of mine.
The radio is governed by an ESP-32 Microcontroller and during its development I encountered several issues around high-frequency signal routing. Fortunately they have been mostly worked out. I learned a lot from this project!
Trackhammer

MIT East Campus, 2025
Trackhammer is an application I built for the lounge in my dorm floor, so that we could all listen to music together. It runs on a massive speaker setup and you can visit it here. I built it so that everyone would be able to add their favorite songs to the play queue, without having to constantly nag whoever had connected their phone to the speaker via bluetooth.
Anyone can play music by visiting the website and entering a SoundCloud link. Every user also has control over volume and playback.
Test Deck

MIT, 2025
The test deck is an IP67 water and dust-proof device for on-the-go robotics testing and development. I made it for testing aquatic robots at the poolside, so I didn’t have to worry about getting my equipment wet.
It’s got USB and video output, 5V and 12V power delivery, and on boot it creates a portable WiFi network for ROS operations.
DJ Visualizer

MIT, 2025
This is a visualization of my Rekordbox music library (the software I use to DJ). I created it for a Critical Internet Studies class in fall of 2025. You can visit it here.
Each song in my library is represented with a node in the graph, and you can click on specific nodes to see the transitions I frequently perform between songs highlighted. Larger nodes mean I play that song more often, and the color of the node indicates the genre. Songs that I often mix together are clustered, which provides a visual representations of the different settings / vibes that I try to DJ. You can also filter by specific genres in my collection, or songs I played on certain dates.
Halo Dance System
MIT East Campus, 2025
The Halo Dance System is a DJ setup, with additional infrastructure I created for beat-synchronized lighting and procedural visual generation and projection.
Beat detection is a surprisingly difficult problem for live DJing, so I spent the summer developing software to allow DJs to integrate their computers into the control system for the entire room. It mines the beat information from the DJ’s Rekordbox application (DJing software) and broadcasts it with OSC, which is a protocol for networking music devices. It also has a fallback audio beat detection algorithm which takes over in case of emergency (and also allows the system to be used with other DJ software). It means that new A/V systems can be easily integrated into the existing setup. It’s also a lot of fun to DJ with.
CORE ROV System
Jesuit Robotics, 2024
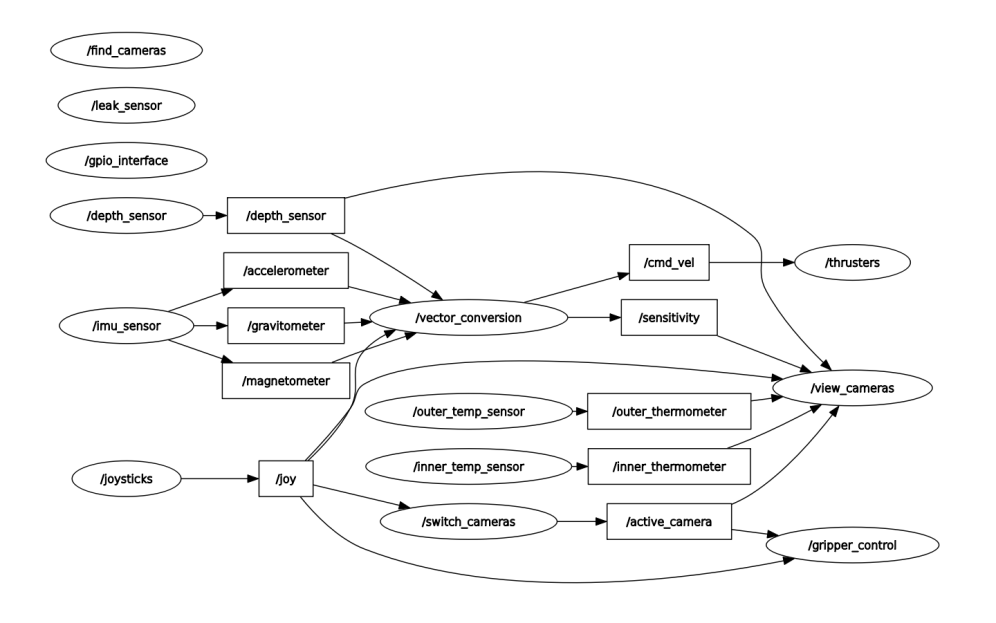
CORE ROV is a ROS2 architecture I created for my high school robotics team’s underwater robot (ROV), which became the architecture for the years to come. It supports 5 degrees of control of the ROV, up to 8 live-streamed video cameras, data from a cluster of sensors, and pilot actuation of two grippers.
You can see an example package for the CORE ROV system here. (Please note that I am no longer the maintainer of this system, so this link is to the last commit I made while I could still take credit for the work being done on the project).
5-axis Robotic Arm
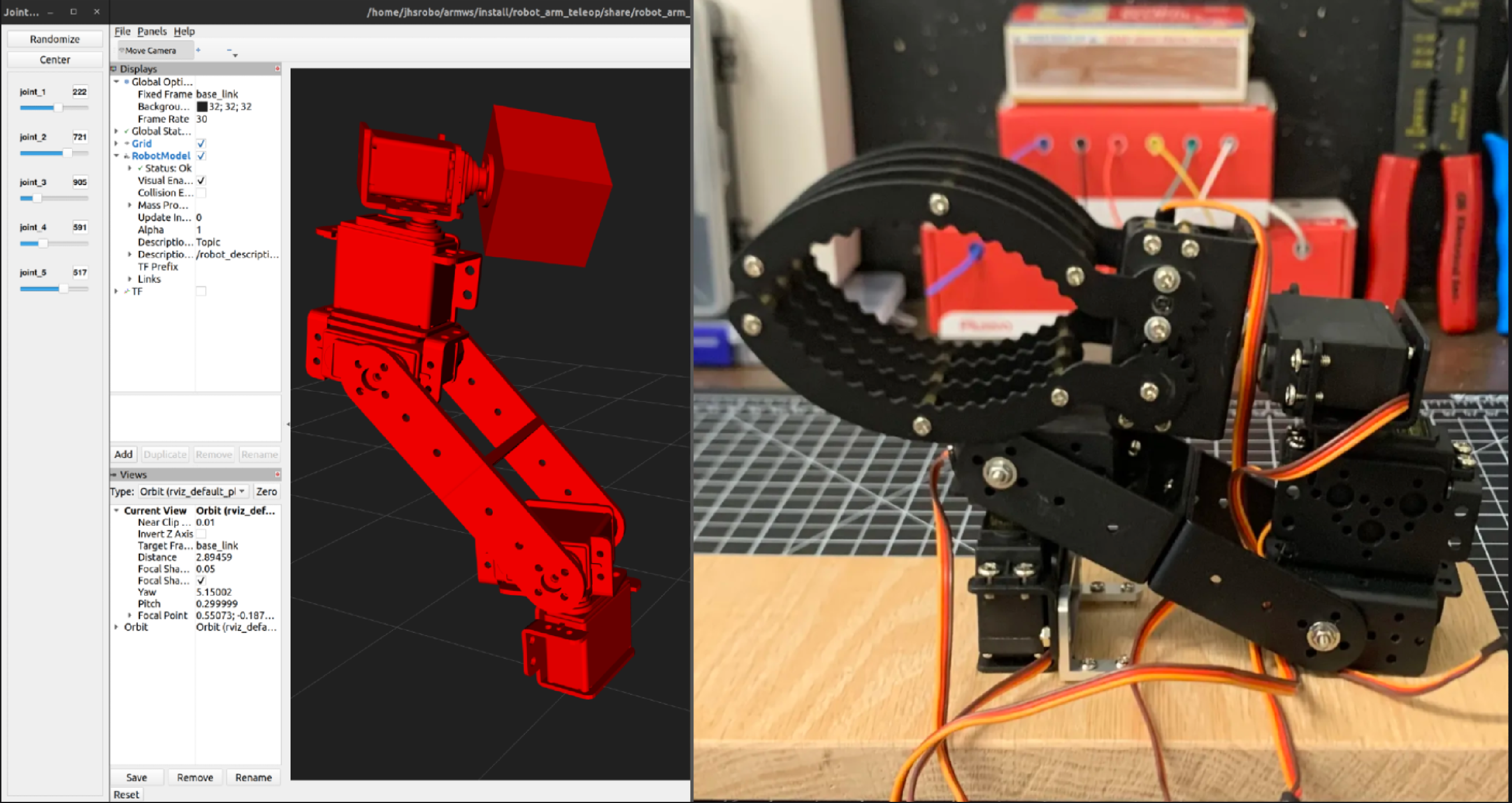
Sacramento, 2024
This was a teeny little personal project for me on winter break of 2024. I put this arm together so I could learn more about URDF/SDF files and the tf2 ROS transformations library for pose manipulation.
I’ve put a pause on this project for now, it’s still at my house in Sacramento in an unfinished state, but I think I learned most of what I set out to with this one already.
ROV Test Hardware
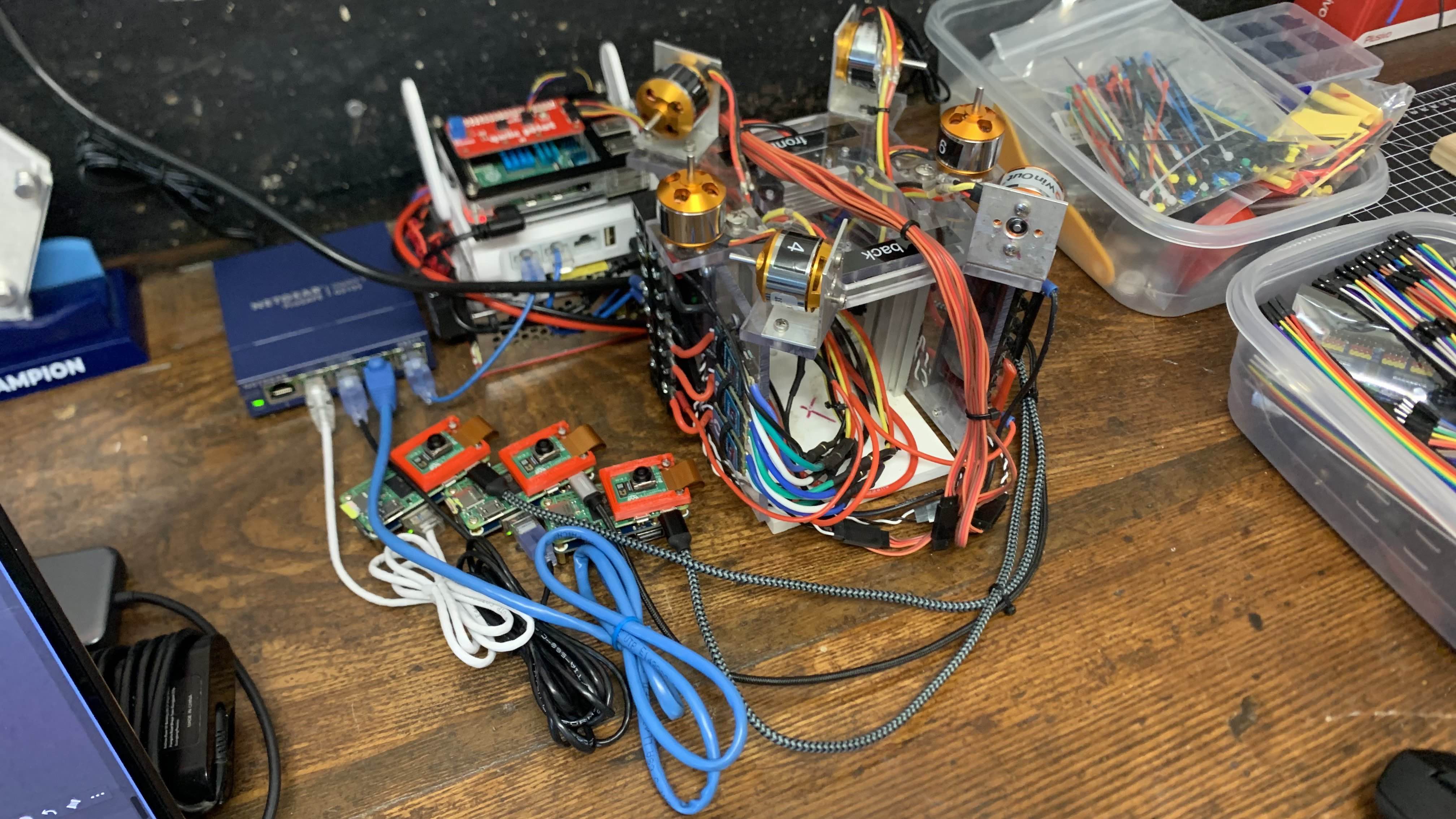
Jesuit Robotics, 2023
This project was the culmination of a series of smaller, separate projects I had been working on during the COVID pandemic. It’s a suite of test hardware that aimed to simulate all hardware functionality of my team’s ROV, so that developers could work on hardware interface code from home / without having to operate the robot in the pool.
The suite is capable of simulating thrusters, cameras, and sensors. Each subsystem is modular and can be run independently of the others, so each developer could take a separate module home to work with it.
Wireless Force Myography Armband
UC Davis BEAR Labs, 2023
This was a project I worked on at the BEAR Labs at UC Davis, designing a wireless force-detecting armband for use in a prosthetic control study.
Myography is the process of measuring muscle activation, and the purpose of this project was to compare two different methods of myography for the sake of trying to reconstruct the movement performed by the user based on the myographic reading.
I created a wireless force myographic armband for use in the trials, to compare against the electromyographic version. You can read the resulting publication here.
Humanoid Robotic Arm

UC Davis BEAR Labs, 2022
This is an Inmoov robotic arm that I built in the summer of 2022 at the BEAR Labs at UC Davis. It is capable of pretty much any motion you can perform with your arm except for tilting your wrist side to side (it can do front to back, though!)
Not pictured above are the special pressure-sensitive fingertips on the arm, for use in prosthetic studies of grip strength and grasp ability.